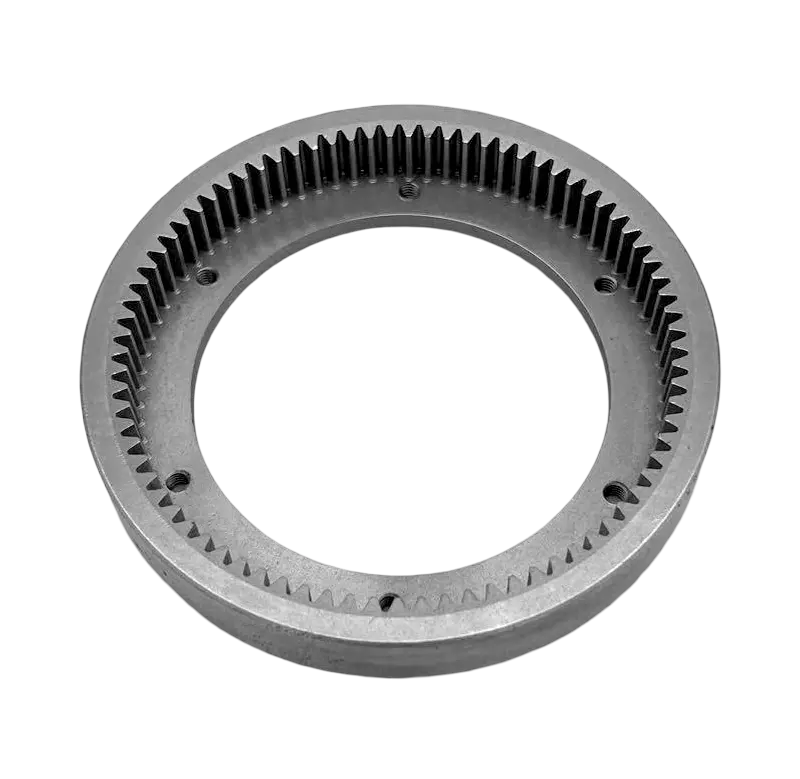
Internal Ring Gear for Quadruped Robot Joint Motors
FRING manufactures lightweight, high-strength internal ring gears for quadruped (four-legged) robot joint motors. These powder metallurgy gears feature thin-wall sections and compact tooth profiles that reduce inertia, enabling agile gaits (trot, bound, gallop) while maintaining torque density and fatigue life under dynamic loads.
Main Datasheet
Applicable Specifications
Stringent Standards, Precision Specifications, Ultimate Reliability
Design & Quality Standards
ISO 9001, AGMA 2000 (Gear rating), AGMA 2101 (Tooth tolerance)
Standard Material Grades
MPIF: FL-4605, FN-0405
Typical Material Properties (Heat Treated)
Density 7.0 – 7.3 g/cm³ | Hardness 35 – 45 HRC Tensile Strength ≥650 MPa Fatigue Limit (Bending) ≥300 MPa
Net-Shape Dimensional Tolerances
Tooth Profile (AGMA Q10): ±0.015 mm Runout: ≤0.03 mm Thin-Wall Section: ±0.05 mm Concentricity: ≤0.02 mm
Performance Verification
Dynamic Torque Density ≥5 Nm/kg Fatigue Life ≥10⁷ cycles @ rated torque Backlash ≤0.1°


Get Your Quote Now
MOQ: 500–2000 pcs (Negotiable depending on part design and volume)
Lead Time: 2–3 weeks for standard parts, 3–5 weeks for custom parts
OEM/ODM: Available
Engineering Support: Yes (Drawing review + Material selection + Magnetic/Mechanical parameter optimization)
Please fill out the form below with your project details and inquiry. One of our technical representatives will get back to you within 24 hours.